
コパカバーナのスメール
この第6章は,ポアンカレ(Henri Poincaré, 1854-1912)の古典的方法の説明から始まる.空間のベクトル場を研究するときには,軌道が繰り返し通過する小円板が見つかることがある.空間内の軌道の集合を研究するよりも,この小円板に含まれる点の列を研究して軌道を理解しようとするものである.しばしば,研究はずっと容易になる:連続時刻のダイナミックスから,離散時刻のダイナミックスに移行するのである.
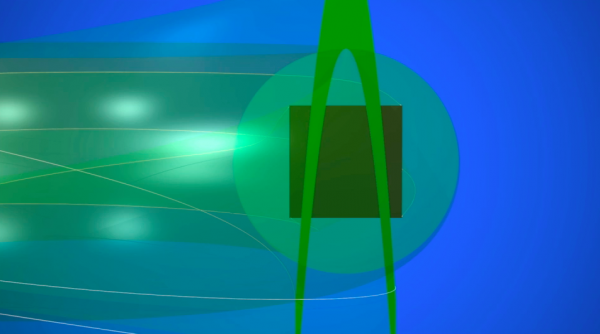
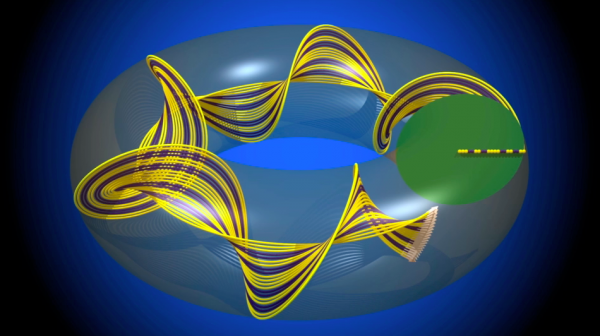
1960年代の始め,若いアメリカ人数学者スティーブ・スメール(Steve Smale, 1930- )は,コパカバーナの浜辺で思索にふけり,馬蹄を発見をした:平面の変換で,引き延ばし,縮め,折り曲げて,正方形を馬蹄形に写すものである.
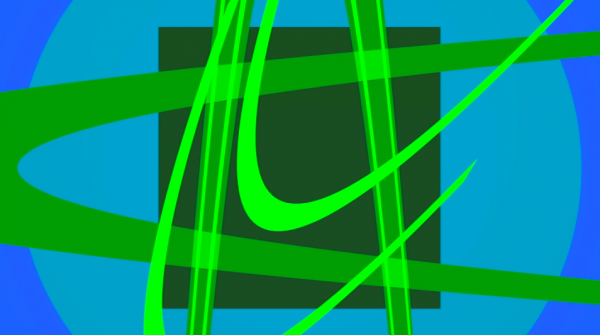
馬蹄のダイナミックスは,非常に豊かであり,未来に向かっても,過去に向かっても,無限に繰り返しが起きる.ビデオでは,馬蹄の中を拡大して複雑さがよくわかるようにしている.
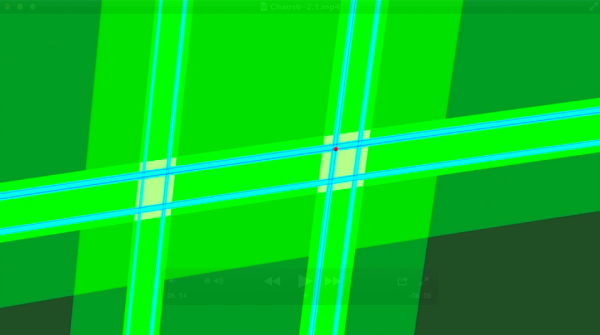
このような対象のダイナミックスをどのように考えれば良いのだろうか?考え方はビリヤードの時と同じで,2つの垂直な帯の部分をA,Bと名付ける.驚いたことにアダマールの測地線やビリヤードのときと,ほとんど同じことが起こるのだ.AとBの任意の有限列に対して,BABBのように繰り返しがあっても,ちょうどその道順をたどる周期点がある.無限列に対しても,それが成り立つのだ!信じがたいことだ!すべてが可能だ…これがカオスの主張するところだ.
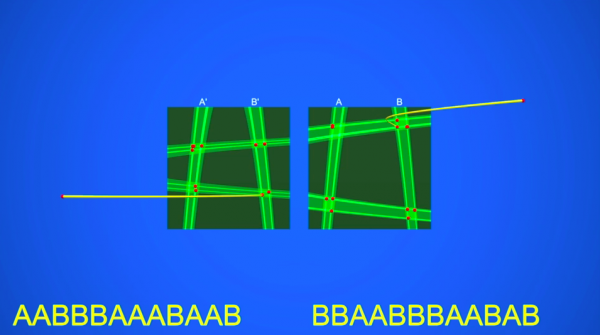

もっと面白いことが起こる.スメールは,馬蹄は安定であることを示した.小さな変形をしても,内部の豊富なダイナミックスは失われない:初期条件に対し軌道が鋭敏に変化することが保たれ,壊されることがないのである.数学では,これを構造安定という概念に定式化していて,ビデオでは,それを左右の2つの馬蹄のダイナミックスがほとんど同じであることによって示している.

カオスの共存性,すなわち,1つ1つの軌道は不安定であることがダイナミックス全体の性質である構造安定性とともにあることは,真に注目すべきことである.
以下のフランス語版の第6章をご覧ください.他の言語を選ぶ,章のリストを見る,字幕のリストを見る,このビデオを利用するためのライセンスの情報を見る,これらのためには,「このビデオについて」のページをご覧ください.